
👤 About me
I'm an avid robotics enthusiast!🤖🤖🤖 Feel free to chat with me 📧📧📧.
I am Yaming Ou, currently a Special Research Assistant at the Tactile Perception and Embodied Manipulation Laboratory, School of Artificial Intelligence, University of Chinese Academy of Sciences (UCAS), working with Prof. Long Cheng.
I received my Ph.D. degree (5-year) from the C2DL Lab, Institute of Automation, Chinese Academy of Sciences (CASIA), and the School of Artificial Intelligence, , University of Chinese Academy of Sciences (UCAS), under the supervision of Prof. Zhou Chao and Assoc. Prof. Fan Junfeng. (CAS President’s Award)
I was engaged in visiting scholar program under the supervision of Prof. Howie Choset at Robotics Institute, Carnegie Mellon University (CMU), and conducting robot control and navigation research at the Biorobotics Lab from March 2025 to March 2026.
I graduated from the School of Automation at Southeast University (SEU, 985) with a Bachelor's degree in Robotics Engineering (Rank: 2/34, Outstanding Graduate Award).
My research interests include: SLAM, cross-media UAV, spatial intelligence, tactile-based mobile manipulation. My work aims to develop robotic systems endowed with perception, localization, autonomous mobility, and unmanned operation capabilities for extreme real-life applications.
🔥 News
2026.07.29 Invited by TIV to review a paper related to robot navigation!😊
2026.06.17 🎉🎉A paper related to Gaussian Splatting SLAM from my first supervised student accepted by IROS! Congratulations to Song!🎉🎉
2026.05.25 🎉A corresponding author paper related to neuromorphic vision 3D reconstruction accepted by TMech!😊
2026.04.29 I successfully completed my doctoral defense and was awarded the the President's Scholarship of UCAS (the highest award for graduate students)!🎉
2026.04.28 🎉A co-first author paper accepted by TIM! (Cooperate with PolyU)!😊
2026.02.04 Invited by IoT to review a paper related to robot localization!😊
2026.01.07 Invited by RINENG to review a paper related to vision calibration!😊
2025.12.23 Invited by KBS to review a paper related to multi-sensor fusion!😊
2025.12.10 Invited by CIT to review a paper related to field robot!😊
2025.12.06 Invited by TII to review a paper related to robot localization!😊
2025.10.05 Invited by IoT to review a paper related to underwater SLAM!😊
2025.10.05 🎉A paper accepted by TMech!😊!
2025.09.29 Invited by ICRA 2026 to review two papers related to robot navigation and mapping!
2025.08.15 Invited by TRO to review a paper related to underwater robot localization!😊
2025.03.15 Arrived in Pittsburgh and starting a new chapter at CMU!🎉🎉
2024.12.25 My paper surpasses 100 citations in Google Scholar!😊😊
2024.12.25 Selected for the UCAS PhD International Cooperation Training Program (one spot per institute)!🎉🎉
2024.11.20 Invited by TIE to review a paper related to semantic localization!🎉🎉
2024.11.20 Awarded China PhD National Scholarship!🎉😊
2024.11.16 A participating paper accepted by Bioinspiration & Biomimetics!😊
2024.07.26 😊😊A SLAM-related paper accepted by TIE!
2024.06.14 Invited by TIV to review a paper related to autonomous driving!🎉🎉
2024.05.30 🎉😊Recognized as an outstanding student leader of UCAS !
2024.03.21 Publish a paper in TSMC!😊😊
2023.11.25 🎉A paper accepted by TIV!😊
2023.10.06 A paper accepted by TII!🎉
2023.06.15 🎉🎉Invited by IEEE Sensor to review a paper related to camera-imu calibration😊
2023.03.27 😊 Publish a paper in TIM!😊
2023.03.09 🎉 Successfully selected for the PHD experimental class of CASIA!🎉
2021.07.29 😊 Participation in the China Control Conference in Shanghai,China!🎉🎉
2021.06.31 🎉🎉 Successfully graduate from SEU and go to Beijing to start PHD!😊
🎓 Educations
2021.09 - 2026.06 Institute of Automation, Chinese Academy of Sciences (Ph.D.)
2021.09 - 2022.06 School of Artificial Intelligence, University of Chinese Academy of Sciences (Ph.D.)
2018.06 - 2021.06 Department of Robotics Engineering, School of Automation, Southeast University (B.E.)
2017.09 - 2018.06 School of Materials Science and Engineering, Southeast University (B.E.)
💼 Experiences
2026.06 - 2029.06 School of Artificial Intelligence, University of Chinese Academy of Sciences (Research Fellow)
2025.03 - 2026.03 Robotics Institute, Carnegie Mellon University (Visiting Scholar)
📝 Publications
For a more detailed presentation, see Publications.
(* indicates corresponding author; † indicates co-first author)
- Y. Ou, S. Xia, et al. "PL-VAP: A Tightly Coupled Self-Localization Framework for Underwater Robots Using Point-Line Features and Visual-Acoustic-Pressure Sensor Fusion," in IEEE/ASME Transactions on Mechatronics [J], 2025. (SCI, JCR Q1, IF=7.3)
- Y. Ou, J. Fan, et al., "Hybrid-VINS: Underwater Tightly-Coupled Hybrid Visual Inertial Dense SLAM for AUV," in IEEE Transactions on Industrial Electronics [J], 2024. (SCI, JCR Q1, IF=7.5)
- Y. Ou et al., "Structured Light-Based Underwater Collision-Free Navigation and Dense Mapping System for Refined Exploration in Unknown Dark Environments," in IEEE Transactions on Systems, Man, and Cybernetics: Systems [J], 2024. (SCI, JCR Q1, IF=8.7)
- Y. Ou, et al., "Water-MBSL: Underwater Movable Binocular Structured Light-Based High-Precision Dense Reconstruction Framework," in IEEE Transactions on Industrial Informatics [J], 2024. (SCI, JCR Q1, IF=12.3)
- Y. Ou, et al., "Binocular Structured Light 3-D Reconstruction System for Low-Light Underwater Environments: Design, Modeling, and Laser-Based Calibration," in IEEE Transactions on Instrumentation and Measurement [J], 2023. (SCI, JCR Q1, IF=5.6)
- Y. Ou, et al., "Data Calibration Algorithm for Artificial Lateral Line Sensor of Robotic Fish on Improved LSTM," in Chinese Control Conference (CCC) [C], Shanghai, China, 2021. (EI)
- Y. Xue†, Y. Ou†, et al., "Multi-Modal Fusion for Underwater Localization through Hierarchical Uncertainty Awareness," in IEEE Transactions on Instrumentation and Measurement, 2026. (SCI, JCR Q1, IF=5.6)
- J. Fan, Y. Ou*, X. Li*, et al., "Structured light vision based pipeline tracking and 3D reconstruction method for underwater vehicle," in IEEE Transactions on Intelligent Vehicles [J], 2023. (corresponding author, SCI, JCR Q1, IF=8.2)
- J. Fan, Y. Jia, Y. Ou*, C. Zhou*, et al., "Event-based underwater structured light system for high-speed 3D reconstruction," in IEEE/ASME Transactions on Mechatronics [J], 2026. (corresponding author, SCI, JCR Q1, IF=7.6)
- S. Xia, Y. Ou*, et al., "HybridSplat: Underwater Dense SLAM via Visual-Acoustic Fusion and Physics-Informed 3D Gaussian Splatting," in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) [C], 2026. (corresponding author, robotics TOP conference)
🏆 Honors & Awards
2026: 📜CAS President’s Award (the highest award of UCAS for graduate students)
2025 📜Three Good Student Model of UCAS (top 1%)
2024 📜Selected for the PhD International Cooperation Program of UCAS (one spot per institute)
2024 📜China PhD National Scholarship (3%, 3W RMB award)
2024 📜Outstanding Student Leader Award of UCAS (top 2%)
2023 📜Selected for the PHD experimental class of CASIA (8/276, 5W RMB scholarships each year)
2022 🥇China ICV Algorithms Challenge Competition(1st place, 2W RMB award)
2022 📜Three Good Students Award of UCAS (top 10%)
2021 🏆Data Application Innovation and Entrepreneurship Competition (merit award, 9/453)
2021 📜Outstanding Graduate Student Award of Southeast University (top 3%)
2020 🥈National College Students Intelligent Vehicle Competition (national 2nd prize)
2020 📜China National Inspiration Scholarship (3.22%)
2019 🥇RoboCup Robotics World Cup (China Region) (national 1st prize)
2019 🥈National College Students Electronic Design Competition (national 2nd prize)
2019 🥇The 10th Robot Competition of Jiangsu Province (provincial 1st prize)
2019 📜Three Good Students Award of Southeast University (top 10%)
2018 🥇The 9th Robot Competition of Jiangsu Province (provincial 1st prize)
2016 🥈High School Mathematics Olympiad Competition, Anhui Province (provincial 2nd prize)
🛠️ Research
For a more detailed presentation, see Publications and Projects.
 | Yaming Ou, Song Xia, Junfeng Fan, etc. IEEE/ASME Transactions on Mechatronics, 2025 A tightly coupled graph-optimization–based point–line feature and visual–acoustic–pressure fusion method, termed PL-VAP, is proposed as the first underwater self-localization framework to jointly integrate multi-feature and multi-modal information. Tags SLAM Multi-sensor Fusion Source [Video] |
 | Yaming Ou, Junfeng Fan, Chao Zhou, etc. IEEE Transactions on Industrial Electronics, 2024 An underwater tightly-coupled hybrid visual inertial dense SLAM framework, named Hybrid-VINS, is proposed, which is the first underwater SLAM system to utilize active vision information to assist passive vision. Tags SLAM Camera-IMU Fusion Source [Video] |
 | Yaming Ou, Junfeng Fan, Chao Zhou, etc. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024 A more adaptable 3D dense mapping robotic system based on self-designed scanning BSL is developed for refined exploration, where the on-board design allows for autonomous mobility and operational capabilities. |
 | Yaming Ou, Junfeng Fan, Chao Zhou, etc. IEEE Transactions on Industrial Informatics, 2023 An SSLSLS-based underwater movable high-precision dense reconstruction framework, named Water-MBSL, is proposed, which takes into account both motion distortion and point cloud registration. |
 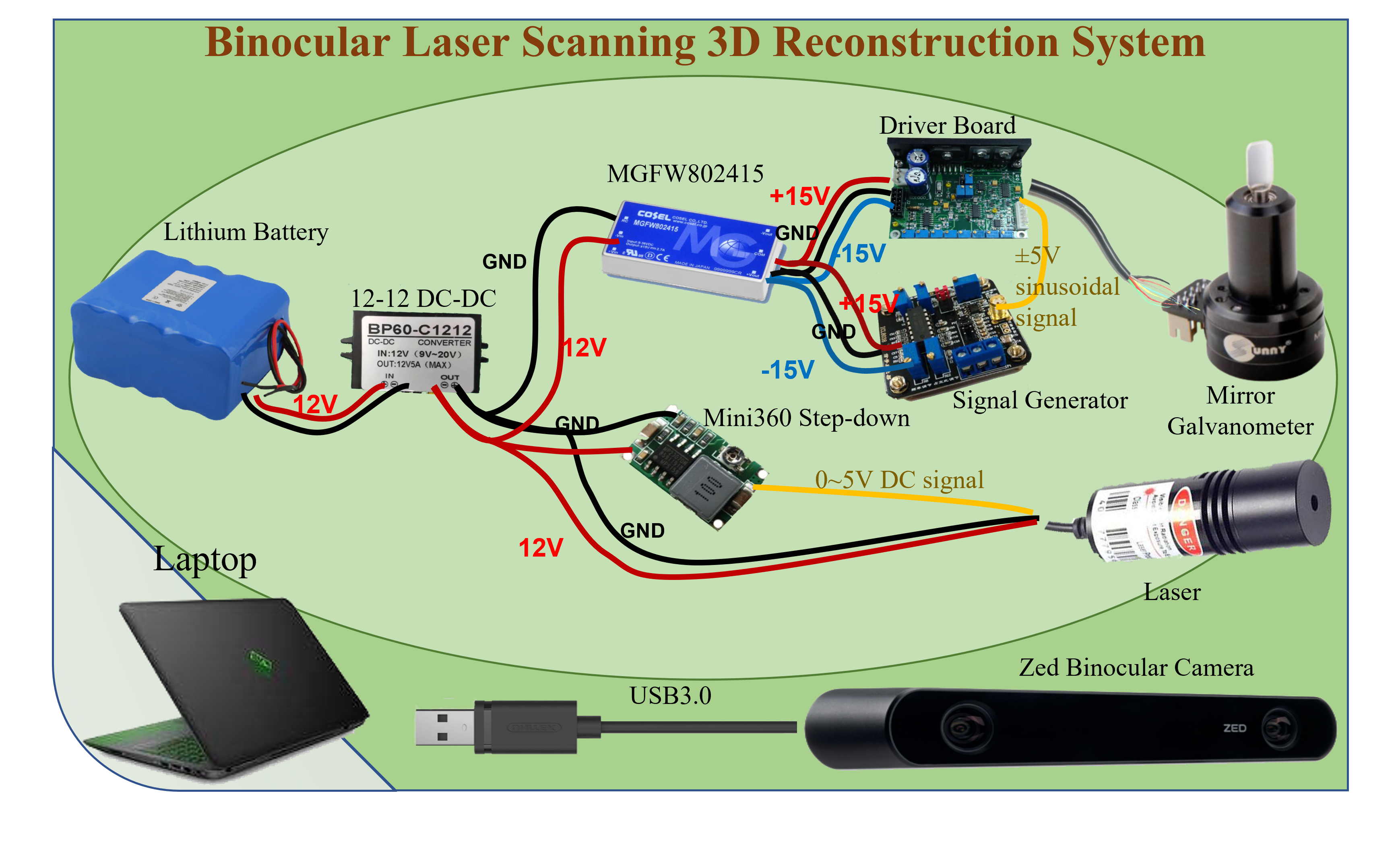 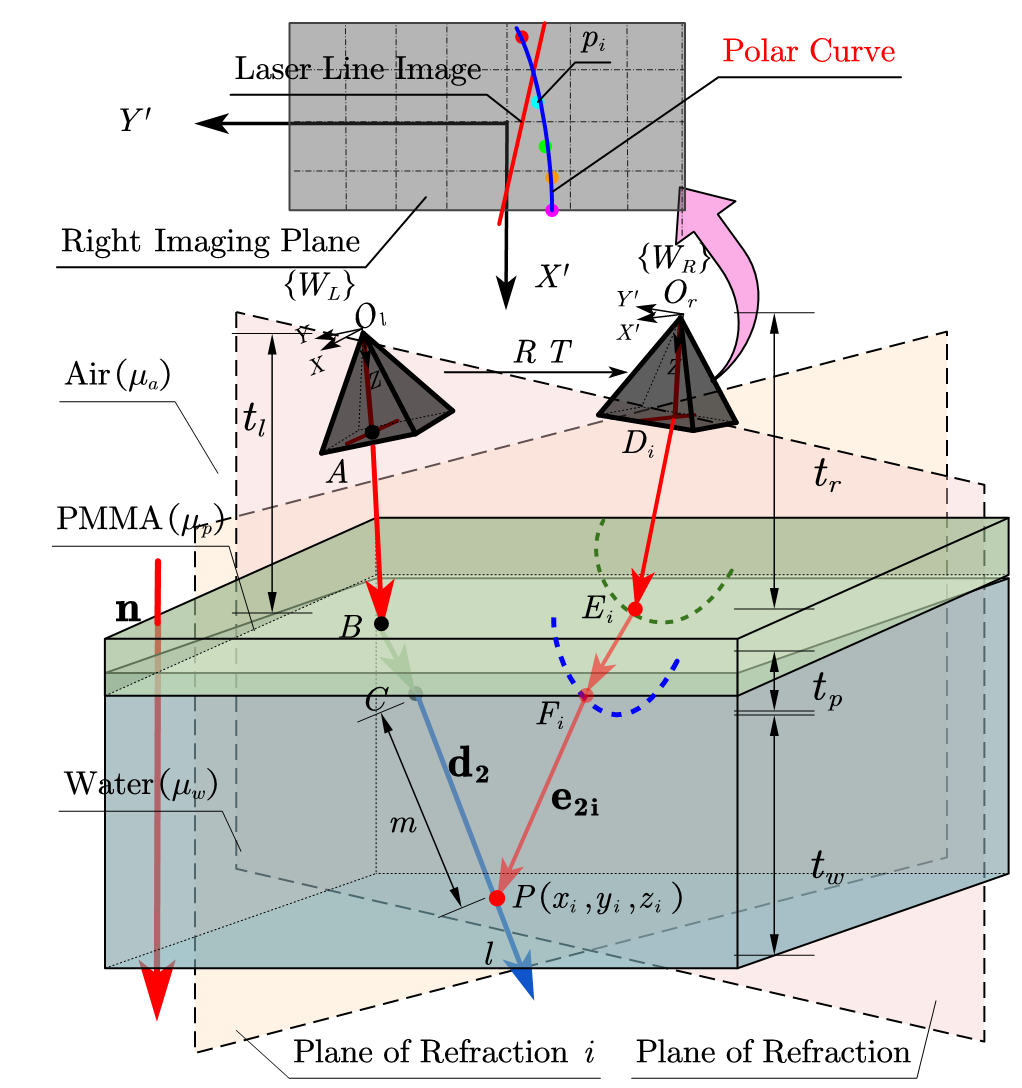 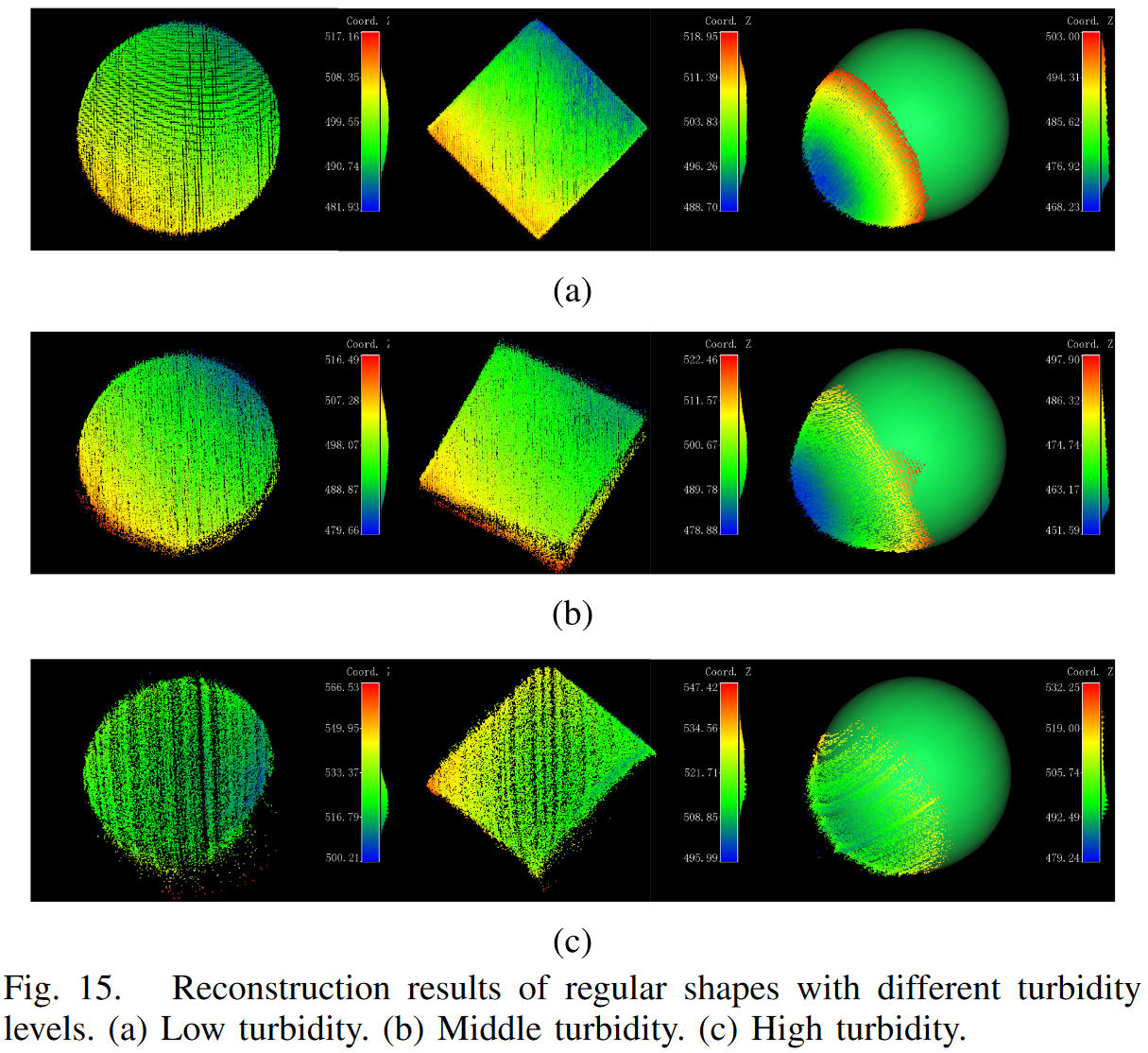 | Yaming Ou, Junfeng Fan, Chao Zhou, etc. IEEE Transactions on Instrumentation and Measurement, 2023 An underwater binocular structured light 3-D reconstruction system with the scanning laser is designed to realize the static high-precision scanning reconstruction of the low-light scene, which is suitable for underwater robot application. Tags 3D Reconstruction Source [Paper] |
 | Junfeng Fan, Yaming Ou*, Xuan Li, etc. (corresponding author) IEEE Transactions on Intelligent Vehicles, 2023 A dual-line laser SLV–based method is proposed for underwater pipeline positioning, enabling simultaneous estimation of lateral, vertical, and heading deviations, and supporting reliable pipeline tracking. |
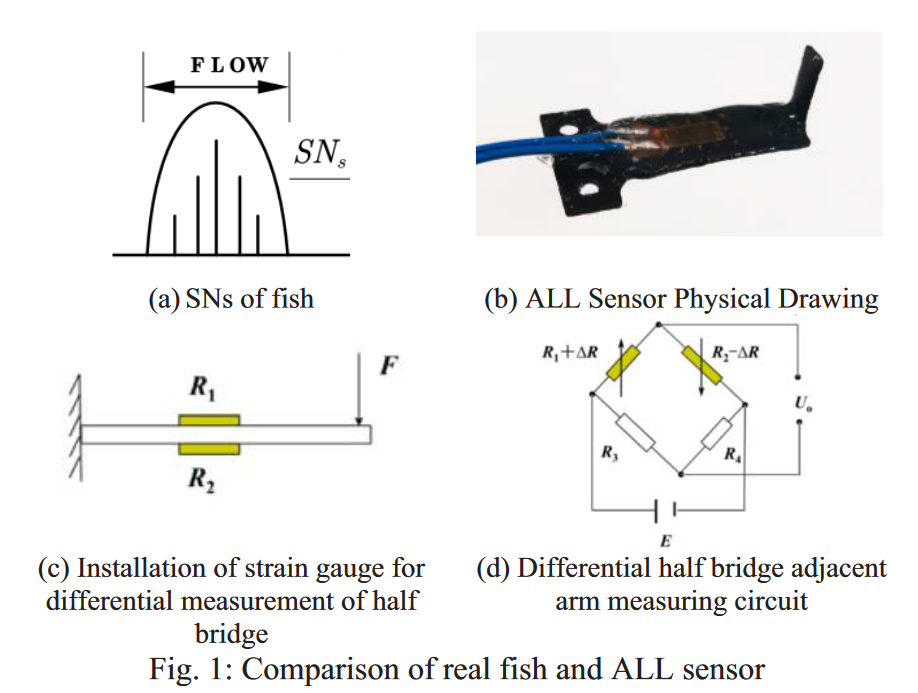 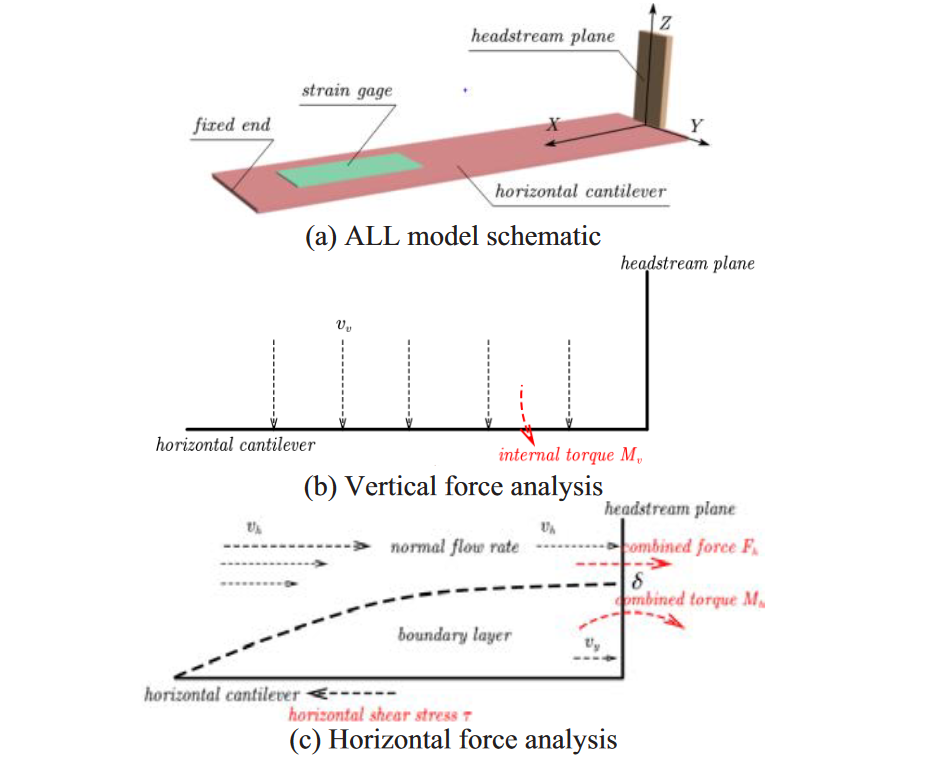 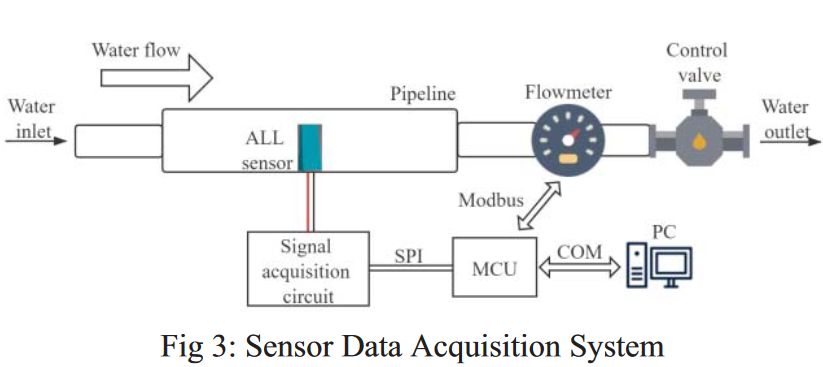 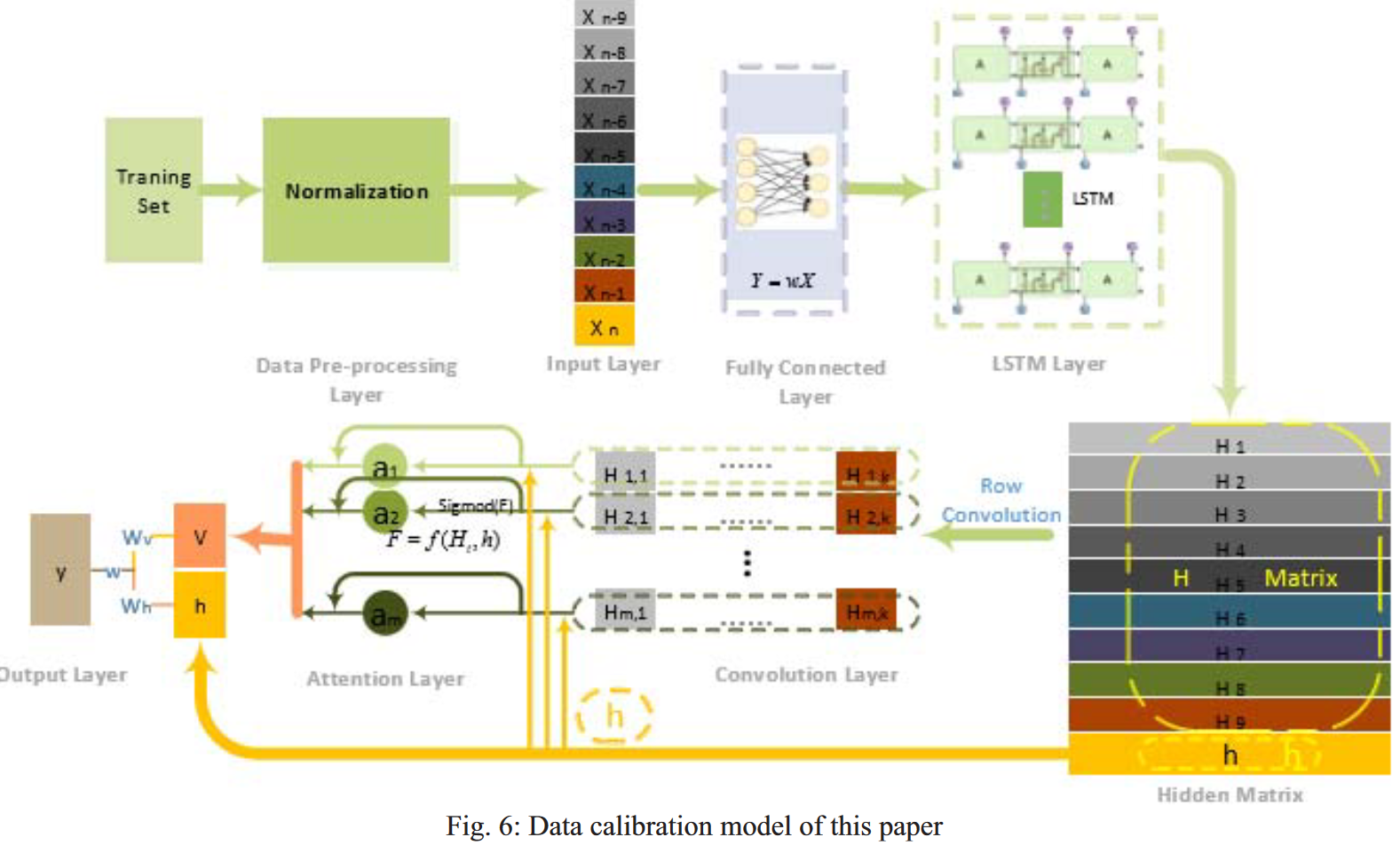 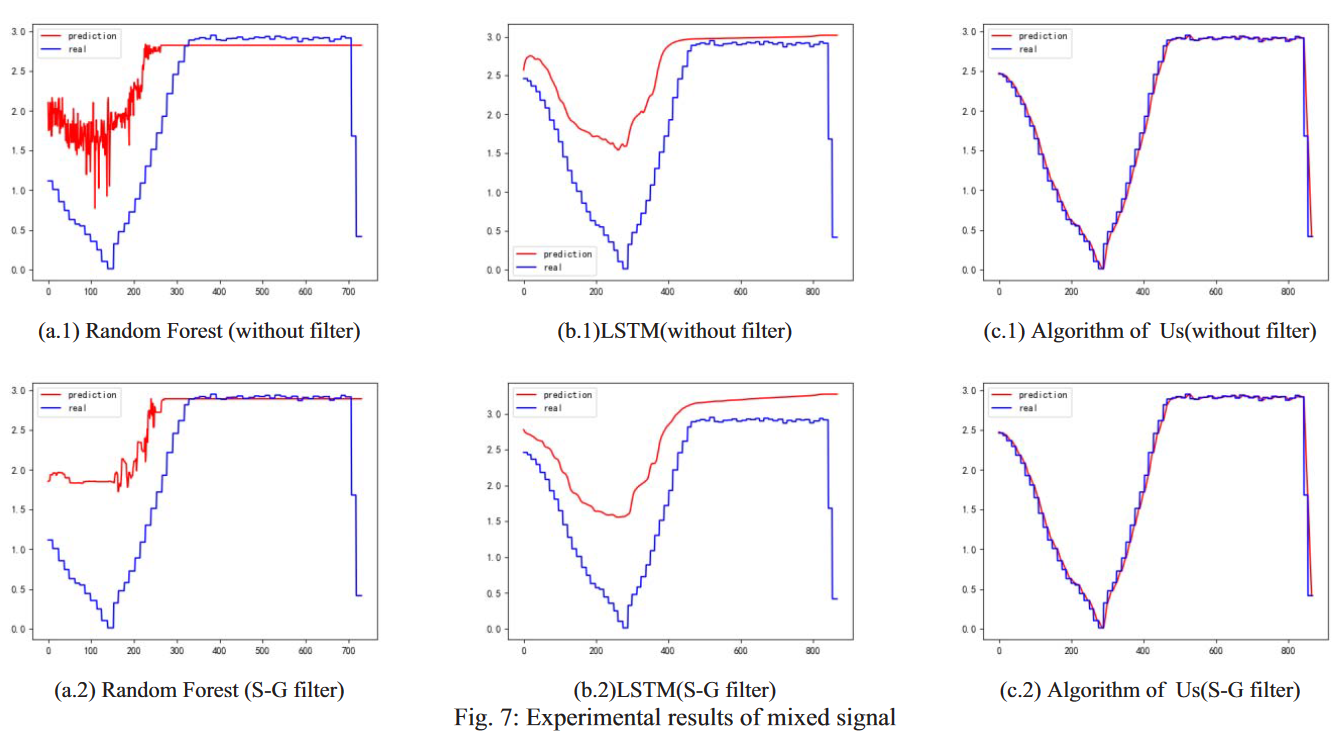 | Yaming Ou, Zhuoliang Zhang, Chao Zhou, etc. 2021 40th Chinese Control Conference (CCC), 2023 A cantilever artificial lateral line (ALL) sensor based on piezoresistive effect was developed by imitating the "SNs" cell structure of real fish to realize underwater speed measurement. Tags Biomimetic Sensor Source [Paper] |